












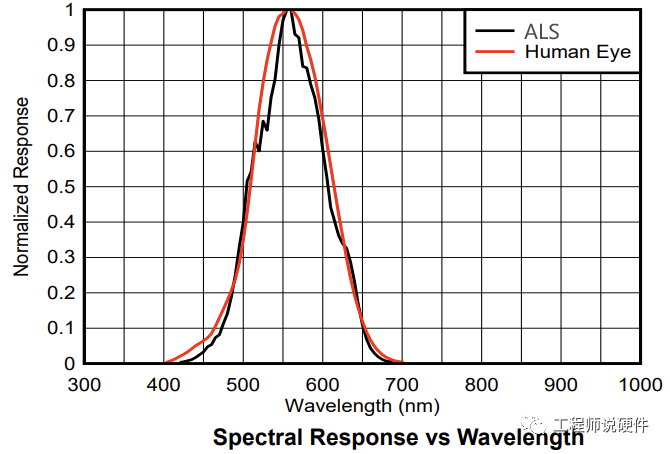
器件。光感主要对400~700nm范围内的可见光有感应,能够匹配人眼的需求,当环境光出现变化时,光感可以实时
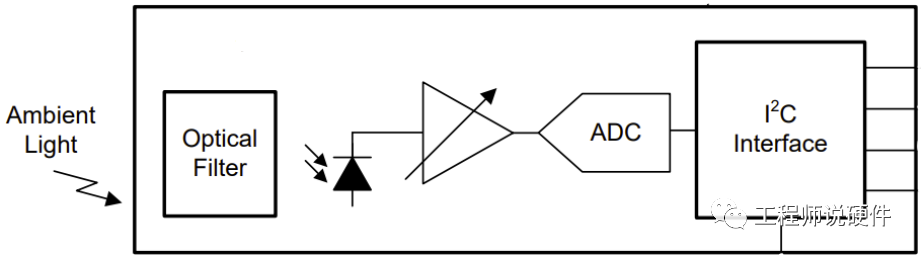
目前各家光感的的原理和构成基本一致,主要包括光学滤波模块、、放大电路、ADC电路和数字处理模块。光学滤波模块主要通过镜片油墨等方式尽量滤除掉红外光,只保留可见光的进入。光电二极管则是将可见光强度信息转化为对应的电流/电压信号并送入后级电路处理,最终输出数字信号给SOC。
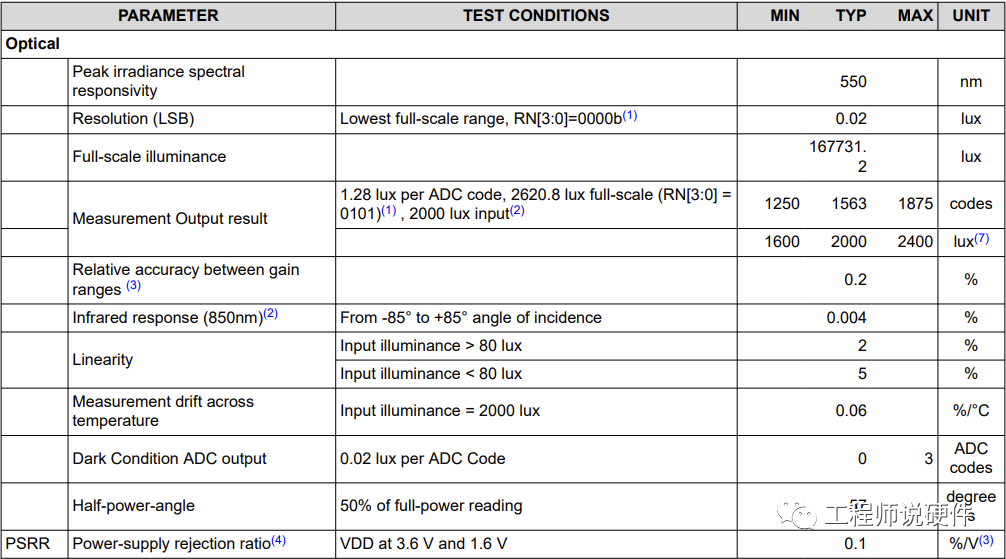
在对光感进行选型和设计的时候,我们需要关注光感器件的一些重点参数。通常情况下,需要重点关注的参数有:FOV、分辨率、动态范围、角度响应、线性度,以及对不同色温光源的响应精度(在第3部分测试内容中介绍)。如下图则是某一光感器件光学参数列表。
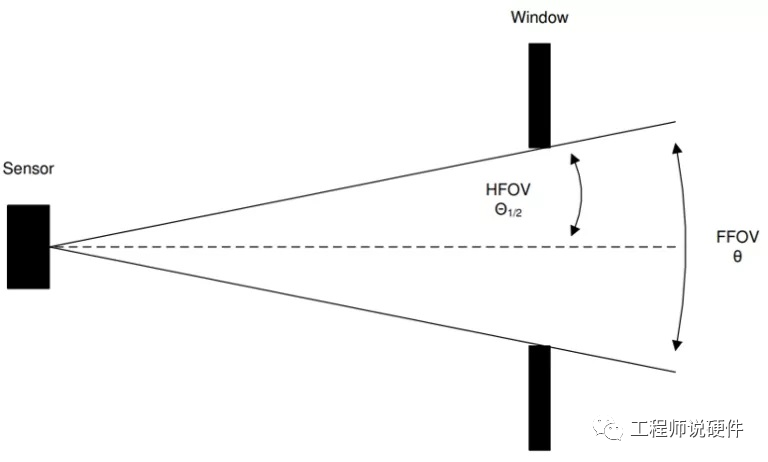
FOV(Field of View),即视场角。为了确保器件能够有效检测到光线,环境光必须在处在一定的入射角之内,整机设计中,结构组件需要参考光感的FOV来设计镜片和开孔等,避免应外部遮挡而影响检测范围。
主要用来表征光感器件的灵敏度特性,为了在暗光环境下,光感仍能保持较好的检测灵敏度,通常需要光感的分辨率
在晴朗的室外环境下,光照强度通常达到10万lux,而夜晚的光线lux。为了在这两种极端光线情况下能准确调节显示屏的亮度,需要光感能正常检测对应的环境光照度。光感能检测的环境光照度最大和最小值即为光感检测的动态范围。
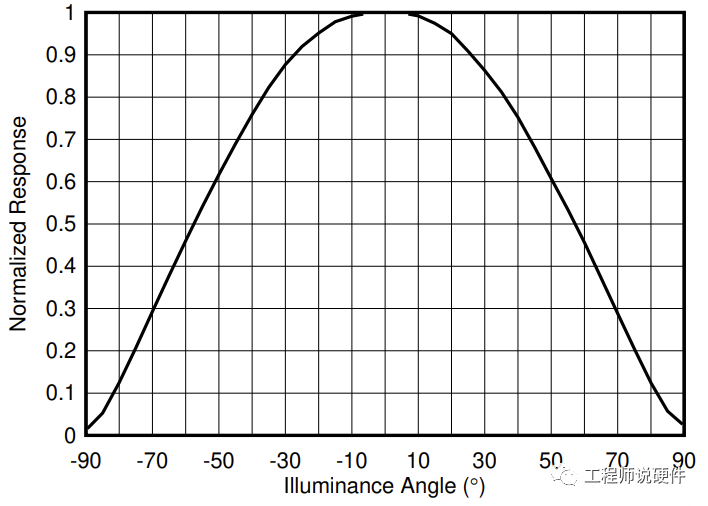
这是指光感对于不同角度的入射光的响应程度,其结果以类似如下的曲线来表示。通常要求整机情况下,45°测试照度值至少为0°时的一半。
随着环境光强度的变化,光感通过其光电转换器,会输出相应幅度的电信号。线性度则是用来衡量输入环境光强度和对应的电信号线性关系的参数,线性度越好,才能月准确地测得环境光强度。
因为sensor、整机结构部件、透光部分部件的差异,每台整机出厂前都需要对光感进行校准,以达到在均匀光照环境中,光感检测到的数据和标准照度计读出的数据尽量一致的目的。
校准的时候,通常需要准备一个功率可调的光源灯箱(比如U30)和一个标准照度计,然后按照如下步骤进行校准:
D、实际检测时,光感最终反馈给上层的照度数据为:Y=K*光感的Raw Data(光感原始数据)。
按照上述步骤完成光感的校准之后,还需要对光感进行测试,验证其准确性。设置灯箱达到某一照度,比如1000lux,此时光感反馈到上层的最终数据误差必须达到设定的标准(根据各家厂商规范,通常需要满足10%~20%的误差要求)。
为了保证设备在不同光源下,能都具有较好的感光效果,因此需要对我们日常生活中可能碰到的各种环境光进行测试,比如太阳光、冷暖光灯等。通常需要测试的光源类型如下:
当然,依据各家的测试标准,还有其他的参数需要测试,比如色温和照度半角测试等,比较简单,这里就不详述了。
文章出处:【微信号:工程师说硬件,微信公众号:工程师说硬件】欢迎添加关注!文章转载请注明出处。
的输出必须和光强成线性关系,光谱波长敏感度应该非常接近人眼。另外,器件的输出应该直接和照射在集成的光敏二
当夜幕降临,汽车仪表盘上有一双“眼睛”默默地感知周围的光线,从而自动调节背光亮度,以保证用户最佳的驾驶体验且降低功耗。这双神奇的 “眼睛”便是今天的主角---
Maxim Integrated Products, Inc.推出Santa Cruz (MAXREFDES23#)
当夜幕降临,汽车仪表盘上有一双“眼睛”默默地感知周围的光线,从而自动调节背光亮度,以保证用户最佳的驾驶体验且降低功耗。这双神奇的 “眼睛”便是今天的主角---
的优点 /
介绍 /
电路 /
RT-Thread Nano系列教程2-2基于 MDK 移植 RT-Thread Nano